
日前,中国科学技术大学团队在软体机器人领域取得突破性进展,实现对多尺度复杂物体的多功能抓取。相关成果以“SpiRobs: Logarithmic Spiral-shaped Robots for Versatile Grasping Across Scales”为题发表在Cell Press旗下期刊Device上。
从自然探索到理论突破
生物进化的奥妙往往能给科学研究带来意想不到的启发。研究团队通过深入观察发现,在自然界中,从象鼻到章鱼触手,从海马到变色龙尾巴,这些生物虽然在体型、栖息环境和解剖结构上存在显著差异,但它们的柔性器官都呈现出一个共同的几何特征——对数螺旋线结构。正是这种特殊的构型,使得这些生物能够轻松完成在人工装置中难以实现的复杂动作。
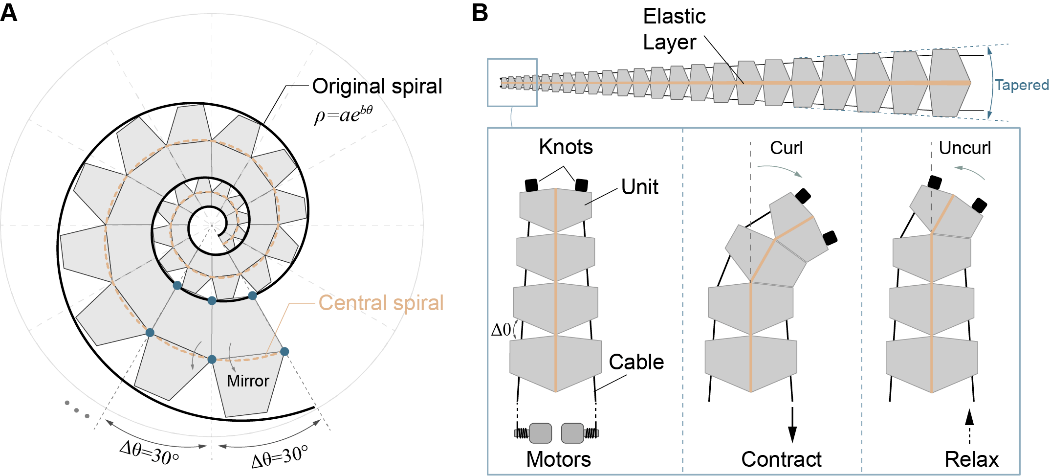
基于这一发现,研究团队开展了系统性的理论研究。他们首先对这种生物形态进行了数学抽象和建模,随后提出了一个独特的逆向设计方案:先确定机器人的极限卷曲状态,使其完全符合对数螺旋线方程,然后通过离散化处理将螺旋线展开,最终得到机器人的直线形主体设计。
在具体设计中,研究人员在机器人中心轴位置巧妙地加入了一个厚度呈线性变化的弹性层。这一设计不仅解决了各个离散单元的连接问题,还为机器人提供了必要的回复力。通过在各单元两侧预留的小孔穿入绳索,实现了对机器人运动的精确控制。这种设计方案大大简化了制造过程,同时保证了机器人的高性能表现。
突破性能与创新设计
理论分析显示,该机器人具有一系列独特的性能特征。首先,其中心轴的最小曲率半径沿身体呈线性变化:越接近尖端,曲率半径越小。这一特性赋予了机器人尖端更高的灵活度和精细操作能力,是实现精确抓取的关键所在。
研究还发现,机器人展开后呈现严格的锥形结构,其锥角大小直接影响着工作空间和性能特征。具体来说,锥角越大,工作空间越小,可抓握的物体尺寸范围也随之减小,但最大负载能力会相应提高。在验证实验中,采用15度锥角设计的机器人展现出了惊人的性能:不仅能够抓取直径相差超过两个数量级的物体,其最大负载更是达到了自重的260倍。
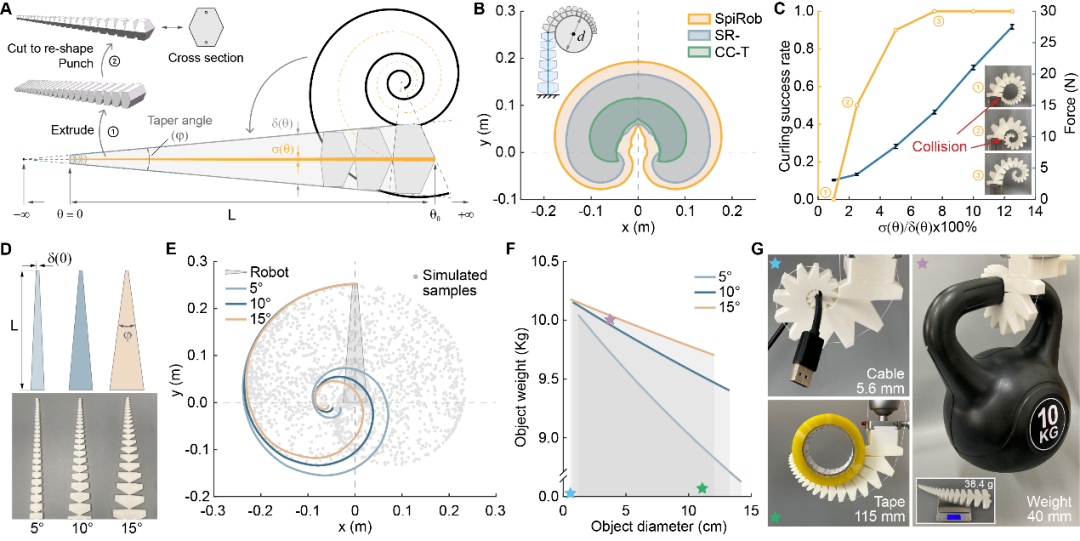
在制造工艺方面,研究团队选择采用3D打印技术实现快速成型。这种方法具有多重优势:首先,成本低廉,便于进行多次设计优化和迭代;其次,制造周期短,能够快速验证设计方案;最重要的是,这种制造方法展现出极强的适应性,能够满足从厘米到米级的不同尺度需求,并可使用聚氨酯、树脂、纸张等多种材质。
创新控制策略与仿生突破
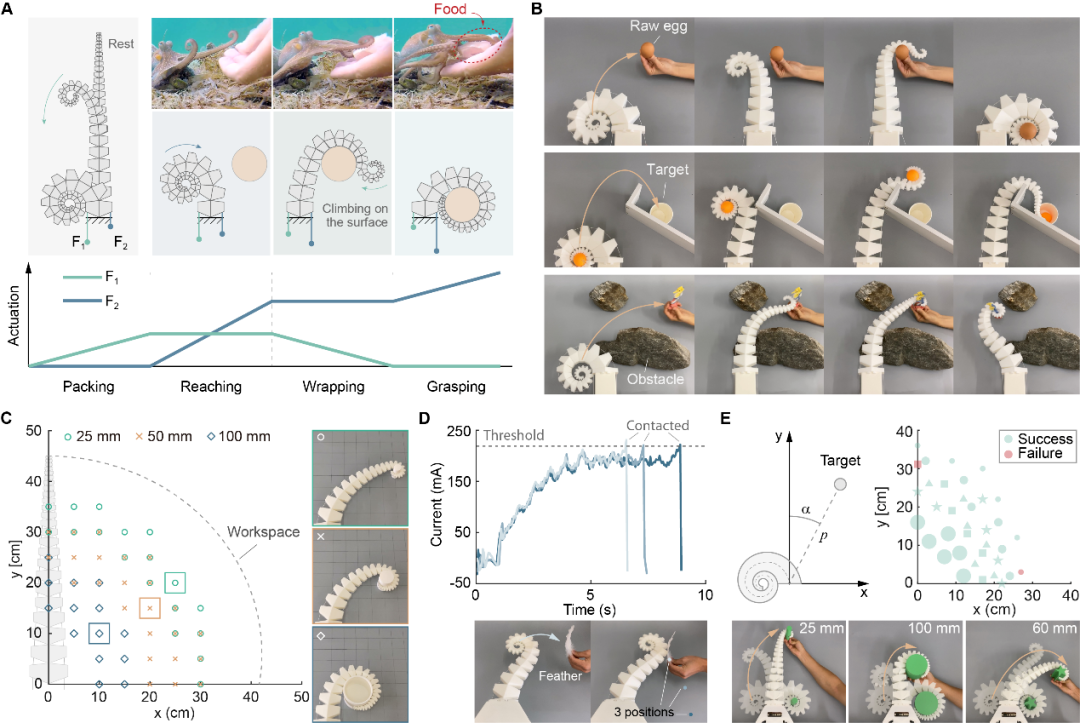
在运动控制方面,研究团队的创新同样令人瞩目。受章鱼触手运动模式的启发,他们开发出了独特的仿生控制策略。通过在两根绳索上施加分段且线性变化的拮抗力,成功实现了包含反卷、伸展、缠绕和抓握四个阶段的复杂运动过程。这种控制策略的核心在于利用螺旋线的时序卷曲和展开特性,实现对未知物体的精确包裹抓取。
值得一提的是,研究团队还开发出了一种基于电流变化检测的本体感知方法。这种方法无需额外添加传感器,就能实现极其灵敏的接触感知能力,其灵敏度高到能够检测到与羽毛的轻微接触。通过将平面上目标物体的位置映射为绳索上的对抗驱动力,实现了对不同位置、不同物体的自动抓取,成功率达94.4%。
多维度应用验证
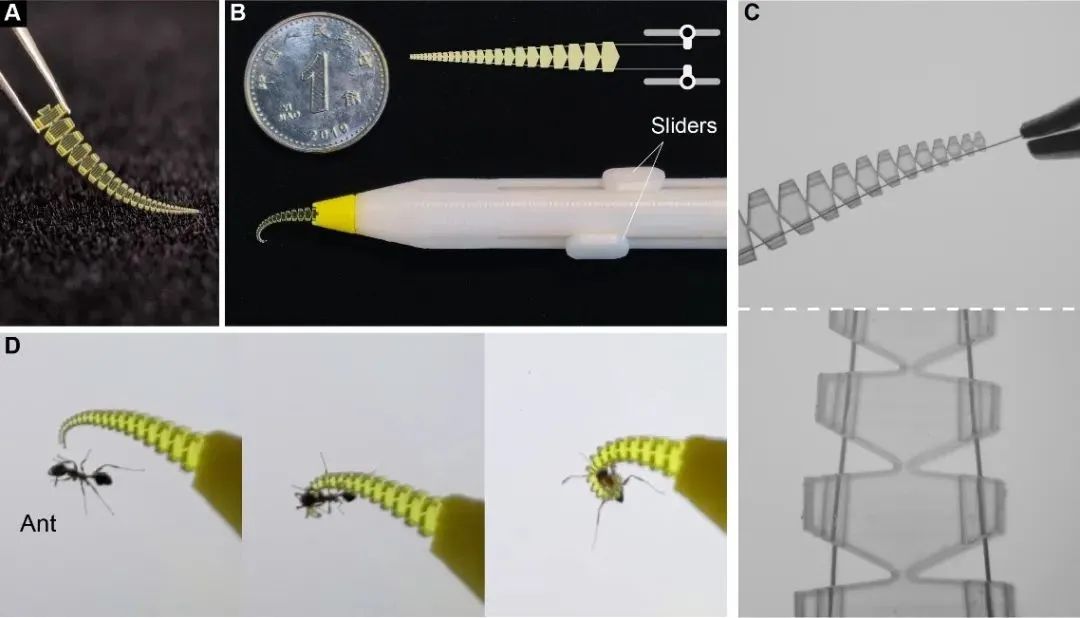
为了充分展示这项技术的应用潜力,研究团队开发了一系列极具代表性的原型系统。在微观尺度上,他们成功制造出了一个突破性的微型螺旋机器人:总长仅1厘米,尖端直径仅0.14毫米。这个微型机器人在20微米细丝驱动下,能够安全、精确地抓取蚂蚁等微小生物,展现出令人惊叹的精细操作能力。
在更复杂的应用场景中,研究团队设计了基于三根绳索驱动的螺旋机器人。这一升级显著提升了机器人的运动自由度,使其能够实现立体抓取、高速定位击打等复杂动作。测试表明,该版本可以在1秒内完成非规则物体的抓取动作,展现出优异的动态性能。
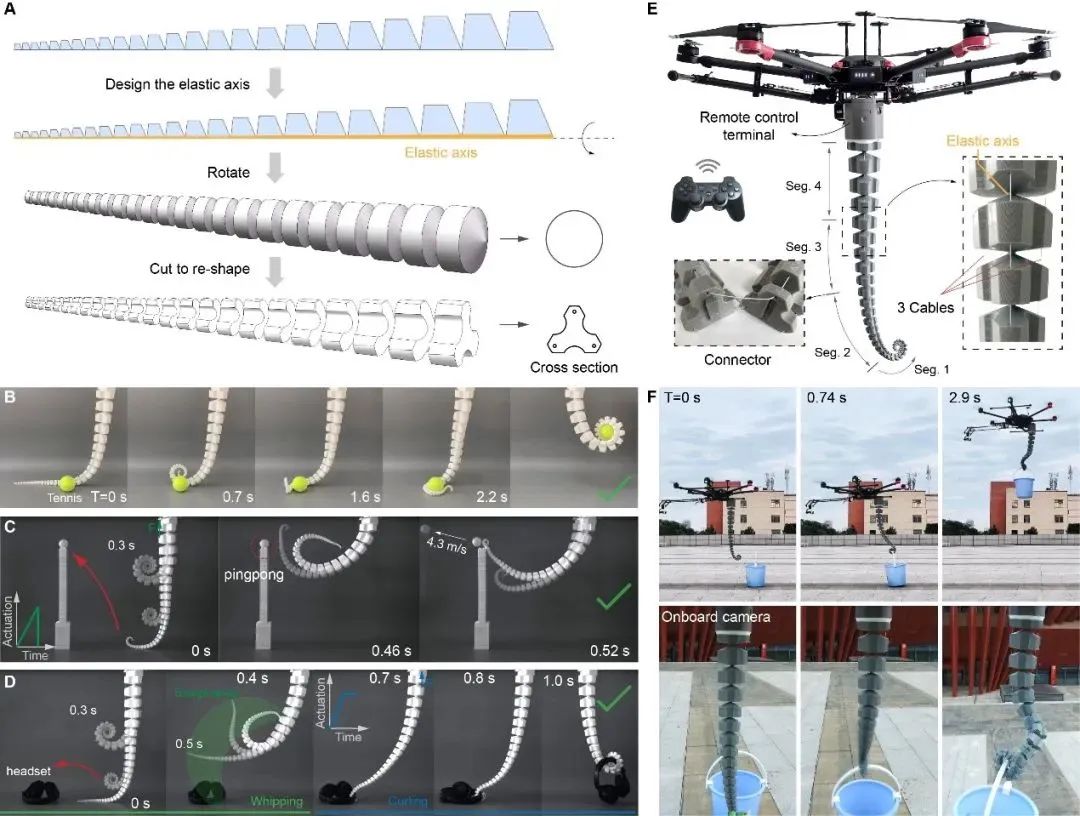
特别值得一提的是,团队还开发出了长度达1米的型螺旋机器人,并将其与无人机系统巧妙结合,搭建了一套可遥控操作的空中抓取装置。这个系统能够在短短3秒内完成从空中接近到抓起地面指定位置物体的全过程,为低空经济领域提供了全新的技术解决方案。
突破性协作与未来展望
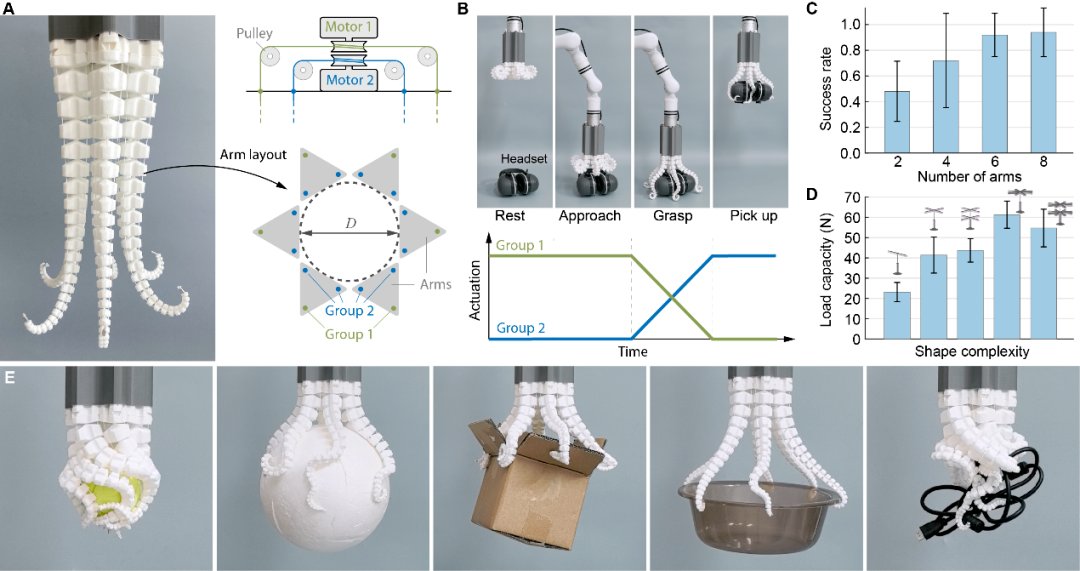
除了单体机器人的性能提升,研究团队还深入探索了多机器人协同工作的可能性。他们创新性地设计了一种由螺旋机器人阵列组成的软手爪系统,将其安装在刚性机械臂末端。通过简单而有效的控制策略,这种软手爪展现出了优异的通用性:从日常用品如脸盆,到精密物品如耳机、数据线,都能实现稳定可靠的抓取操作。
这项研究的重要意义不仅在于提出了一种新型的软体机器人设计方案,更在于其极强的普适性和可扩展性。通过对自然界生物肢体形态的数学抽象,研究团队显著简化了开发流程,减少了试错和验证成本。结合精巧的绳索驱动和仿生操作策略,该类机器人成功实现了从2D到3D的维度拓展,以及从地面到空中的场景多样化。
展望未来,这项创新技术有望进一步推进软体机器人的发展和成熟。为复杂抓取任务、人机交互、低空经济产业等应用场景提供强大的技术支持和创新解决方案。
(来源:股友1720Y0720N的财富号 2024-12-25 16:37) [点击查看原文]
